De Wikipedia, la enciclopedia libre
La cantidad de movimiento, momento lineal, ímpetu o moméntum es una magnitud vectorial, unidad SI: (kg m/s) que, en mecánica clásica, se define como el producto de la masa del cuerpo y su velocidad en un instante determinado. En cuanto al nombre, Galileo Galilei en su Discursos sobre dos nuevas ciencias usa el término italiano impeto, mientras que Isaac Newton usa en Principia Mathematica el término latino motus[1] (movimiento) y vis (fuerza). Moméntum es una palabra directamente tomada del latín mōmentum, derivado del verbo mŏvēre 'mover'.
En Mecánica Clásica la forma más usual de introducir la cantidad de movimiento es mediante definición como el producto de la masa (kg) de un cuerpo material por su velocidad (m/s), para luego analizar su relación con la ley de Newton a través del teorema del impulso y la variación de la cantidad de movimiento. No obstante, después del desarrollo de la Física Moderna, esta manera de hacerlo no resultó la más conveniente para abordar esta magnitud fundamental.
El defecto principal es que esta forma esconde el concepto inherente a la magnitud, que resulta ser una propiedad de cualquier ente físico con o sin masa, necesaria para describir las interacciones. Los modelos actuales consideran que no sólo los cuerpos masivos poseen cantidad de movimiento, también resulta ser un atributo de los campos y los fotones.
La cantidad de movimiento obedece a una ley de conservación, lo cual significa que la cantidad de movimiento total de todo sistema cerrado (o sea uno que no es afectado por fuerzas exteriores, y cuyas fuerzas internas no son disipadoras) no puede ser cambiada y permanece constante en el tiempo.
En el enfoque geométrico de la mecánica relativista la definición es algo diferente. Además, el concepto de momento lineal puede definirse para entidades físicas como los fotones o los campos electromagnéticos, que carecen de masa en reposo. No se debe confundir el concepto de momento lineal con otro concepto básico de la mecánica newtoniana, denominado movimiento angular, que es una magnitud diferente.
Finalmente, se define el impulso recibido por una partícula o un cuerpo como la variación de la cantidad de movimiento durante un período dado:

siendo pf la cantidad de movimiento al final del intervalo y p0 al inicio del intervalo.
[editar] Cantidad de movimiento en mecánica clásica
[editar] Mecánica newtoniana
Históricamente el concepto de cantidad de movimiento surgió en el contexto de la mecánica newtoniana en estrecha relación con el concepto de velocidad y el de masa. En mecánica newtoniana se define la cantidad de movimiento lineal como el producto de la masa por la velocidad:

La idea intuitiva tras esta definición está en que la "cantidad de movimiento" dependía tanto de la masa como de la velocidad: si se imagina una mosca y un camión, ambos moviéndose a 40 km/h, la experiencia cotidiana dice que la mosca es fácil de detener con la mano mientras que el camión no, aunque los dos vayan a la misma velocidad. Esta intuición llevó a definir una magnitud que fuera proporcional tanto a la masa del objeto móvil como a su velocidad.
[editar] Mecánica lagrangiana y hamiltoniana
En las formulaciones más abstractas de la mecánica clásica, como la mecánica lagrangiana y la mecánica hamiltoniana, además del momento lineal y del momento angular se pueden definir otros momentos, llamados momentos generalizados o momentos conjugados, asociados a cualquier tipo de coordenada generalizada. Se generaliza así la noción de momento.
Si se tiene un sistema mecánico definido por su lagrangiano L definido en términos de las coordenadas generalizadas (q1,q2,...,qN) y las velocidades generalizadas, entonces el momento conjugado de la coordenada qi viene dado por:

Cuando la coordenada qi es una de las coordenadas de un sistema de coordenadas cartesianas, el momento conjugado coincide con una de las componentes del momento lineal, y, cuando la coordenada generalizada representa una coordenada angular o la medida de un ángulo, el momento conjugado correspondiente resulta ser una de las componentes del momento angular.
[editar] Cantidad de movimiento de un medio continuo
Si estamos interesados en averiguar la cantidad de movimiento de, por ejemplo, un fluido que se mueve según un campo de velocidades es necesario sumar la cantidad de movimiento de cada partícula del fluido, es decir, de cada diferencial de masa o elemento infinitesimal, es decir

[editar] Cantidad de movimiento en mecánica relativista
La constancia de la velocidad de la luz en todos los sistemas inerciales tiene como consecuencia que la fuerza aplicada y la aceleración adquirida por un cuerpo material no sean colineales en general, por lo cual la ley de Newton expresada como F=ma no es la más adecuada. La ley fundamental de la mecánica relativista aceptada es F=dp/dt.
El Principio de Relatividad establece que las leyes de la Física conserven su forma en los sistemas inerciales (los fenómenos siguen las mismas leyes). Aplicando este Principio en la ley F=dp/dt se obtiene el concepto de masa relativista, variable con la velocidad del cuerpo, si se mantiene la definición clásica (newtoniana) de la cantidad de movimiento.
En el enfoque geométrico de la mecánica relativista, puesto que el intervalo de tiempo efectivo percibido por una partícula que se mueve con respecto a un observador difiere del tiempo medido por el observador. Eso hace que la derivada temporal del momento lineal respecto a la coordenada temporal del observador inercial y la fuerza medida por él no coincidan. Para que la fuerza sea la derivada temporal del momento es necesario emplear la derivada temporal respecto al tiempo propio de la partícula. Eso conduce a redefinir la cantidad de movimiento en términos de la masa y la velocidad medida por el observador con la corrección asociada a la dilatación de tiempo experimentada por la partícula. Así, la expresión relativista de la cantidad de movimiento de una partícula medida por un observador inercial viene dada por:
donde v2,c2 son respectivamente el módulo al cuadrado de la velocidad de la partícula y la velocidad de la luz al cuadrado y γ es el factor de Lorentz.
Además, en mecánica relativista, cuando se consideran diferentes observadores en diversos estados de movimiento surge el problema de relacionar los valores de las medidas realizadas por ambos. Eso sólo es posible si en lugar de considerar vectores tridimensionales se consideran cuadrivectores que incluyan coordenadas espaciales y temporales. Así, el momento lineal definido anteriormente junto con la energía constituye el cuadrivector momento-energía o cuadrimomento P:

Los cuadrimomentos definidos como en la última expresión medidos por dos observadores inerciales se relacionarán mediante las ecuaciones suministradas por las transformaciones de Lorentz.
[editar] Cantidad de movimiento en mecánica cuántica
La mecánica cuántica postula que a cada magnitud física observable  le corresponde un operador lineal autoadjunto
le corresponde un operador lineal autoadjunto  , llamado simplemente "observable", definido sobre un dominio de espacio de Hilbert abstracto. Este espacio de Hilbert representa cada uno de los posibles estados físicos que puede presentar un determinado sistema cuántico.
, llamado simplemente "observable", definido sobre un dominio de espacio de Hilbert abstracto. Este espacio de Hilbert representa cada uno de los posibles estados físicos que puede presentar un determinado sistema cuántico.
Aunque existen diversas maneras de construir un operador asociado a la cantidad de movimiento, la forma más frecuente es usar como espacio de Hilbert para una partícula el espacio de Hilbert  y usar una representación de los estados cuánticos como funciones de onda. En ese caso, las componentes cartesianas del momento lineal se definen como:
y usar una representación de los estados cuánticos como funciones de onda. En ese caso, las componentes cartesianas del momento lineal se definen como:

Resulta interesante advertir que dichos operadores son autoadjuntos sólo sobre el espacio de funciones absolutamente continuas de que constituyen un dominio denso de dicho espacio. Cuidado con esto, pues los autovalores del operador momento, salvo que nos limitemos a , no tienen por qué ser reales. De hecho, en general pueden ser complejos.
[editar] Conservación
[editar] Mecánica newtoniana
En un sistema mecánico de partículas aislado (cerrado) en el cual las fuerzas externas son cero, el momento lineal total se conserva si las partículas materiales ejercen fuerzas paralelas a la recta que las une, ya que en ese caso dentro de la dinámica newtoniana del sistema de partículas puede probarse que existe una integral del movimiento dada por:
Donde  son respectivamente los vectores de posición y las velocidades para la partícula i-ésima medidas por un observador inercial.
son respectivamente los vectores de posición y las velocidades para la partícula i-ésima medidas por un observador inercial.
[editar] Mecánica lagrangiana y hamiltoniana
En mecánica lagrangiana «si el lagrangiano no depende explícitamente de alguna de las coordenadas generalizadas entonces existe un momento generalizado que se mantiene constante a lo largo del tiempo», resultando por tanto esa cantidad una integral del movimiento, es decir, existe una ley de conservación para dicha magnitud. Pongamos por caso que un sistema mecánico tiene un lagrangiano tiene n grados de libertad y su lagrangiano no depende una de ellas, por ejemplo la primera de ellas, es decir:

En ese caso, en virtud de las ecuaciones de Euler-Lagrange existe una magnitud conservada  que viene dada por:
que viene dada por:

Si el conjunto de coordenadas generalizadas usado es cartesiano entonces el tensor métrico es la delta de Kronecker gij(q2,...,qn) = δij y la cantidad coincide con el momento lineal en la dirección dada por la primera coordenada.
En mecánica hamiltoniana existe una forma muy sencilla de ver determinar si una función que depende de las coordenadas y momentos generalizados da lugar o no a una ley de conservación en términos del paréntesis de Poisson. Para determinar esa expresión calculemos la derivada a lo largo de la trayectoria de una magnitud:

A partir de esa expresión podemos ver que para «un momento generalizado se conservará constante en el tiempo, si y sólo si, el hamiltoniano no depende explícitamente de la coordenada generalizada conjugada» como se puede ver:

[editar] Mecánica relativista
En teoría de la relatividad la cantidad de movimiento o cuadrimomento se define como un vector P el producto de la cuadrivelocidad U por la masa (en reposo) de una partícula:
En relatividad general esta cantidad se conserva si sobre ella no actúan fuerzas exteriores. En relatividad general la situación es algo más compleja y se puede ver que la cantidad de movimiento se conserva para una partícula si esta se mueve a lo largo de una línea geodésica. Para ver esto basta comprobar que la derivada respecto al tiempo propio se reduce a la ecuación de las geodésicas, y esta derivada se anula si y sólo si la partícula se mueve a lo largo de una línea de universo que sea geodésica:
![frac{dP^alpha}{dtau} = U^betanabla_beta P^alpha = U^betaleft[mfrac{dU^alpha}{dx^beta}+ mGamma^alpha_{gammabeta}U^gamma right] = mleft[ frac{d^2x^alpha}{dtau^2}+ Gamma^alpha_{gammabeta} frac{dx^gamma}{dtau} frac{dx^beta}{dtau} right]](https://petalofucsia.blogia.com/upload/externo-83f7dae58286079898db1970babd52b2.png)
En general para un cuerpo macroscópico sólido de cierto tamaño en un campo gravitatorio que presenta variaciones importantes de un punto a otro del cuerpo no es posible que cada una de las partículas siga una línea geodésica sin que el cuerpo se fragmente o perdiendo su integridad. Esto sucede por ejemplo en regiones del espacio-tiempo donde existen fuertes variaciones de curvatura. Por ejemplo en la caída dentro de un agujero negro, las fuerzas de marea resultantes de la diferente curvatura del espacio-tiempo de un punto a otro despedazarían un cuerpo sólido cayendo dentro de un agujero negro.
[editar] Mecánica cuántica
Como es sabido en mecánica cuántica una cantidad se conserva si el operador autoadjunto que representa a dicha magnitud u observable conmuta con el hamiltoniano, de modo similar a como en mecánica hamiltoniana una magnitud se conserva si el paréntesis de Poisson con el hamiltoniano se anula. Tomando como espacio de Hilbert del sistema de una partícula dentro de un potencial una representación de tipo . Se tiene que:
![frac{d hat{p}_i}{d t} = -frac{i}{hbar}[hat{p}_i, hat{H}] = - boldsymbol{nabla} V(x_i)](https://petalofucsia.blogia.com/upload/externo-d5d539b02382c8727c1d9c7ef52d31b3.png)
Por tanto, si el potencial no depende de las coordenadas xi, entonces la cantidad de movimiento de la partícula se conserva. Además, la última expresión es formalmente equivalente a la del caso clásico en términos del paréntesis de Poisson. Teniendo en cuenta claro está, que éste es el hamiltoniano cuántico, y que las cantidades físicas, no son las mismas que en la mecánica clásica, sino operadores que representan las cantidades clásicas (observables).
[editar] Véase también
[editar] Referencia
- ↑ En época clásica mōtĭo y mōtus eran sinónimos ambos derivados del verbo mŏvēre 'mover'.
[editar] Bibliografía
- Landau & Lifshitz: Mecánica, Ed. Reverté, Barcelona, 1991. ISBN 84-291-4081-6
- Halliday, David; Robert Resnick (1960-2007). Fundamentals of Physics. John Wiley & Sons. Chapter 9.
- Tipler, Paul (1998). Physics for Scientists and Engineers: Vol. 1: Mechanics, Oscillations and Waves, Thermodynamics (4th ed.). W. H. Freeman. ISBN 1-57259-492-6
[editar] Enlaces externos

 Wikcionario tiene definiciones para error.Wikcionario
Wikcionario tiene definiciones para error.Wikcionario Wikiquote alberga frases célebres de o sobre Error. Wikiquote
Wikiquote alberga frases célebres de o sobre Error. Wikiquote



 es el
es el  o
o  o bien
o bien  y está definida por:
y está definida por:

 o bien
o bien  y está definido por:
y está definido por:





 El dominio de esta función es
El dominio de esta función es 
 El dominio de esta función es
El dominio de esta función es  puesto que la función
puesto que la función  El dominio de esta función es
El dominio de esta función es  ya que los logaritmos están definidos sólo para números positivos.
ya que los logaritmos están definidos sólo para números positivos. El dominio de esta función es
El dominio de esta función es  porque la raíz de un número negativo no existe en el campo de los Reales.
porque la raíz de un número negativo no existe en el campo de los Reales.
 no estará definida cuando
no estará definida cuando 

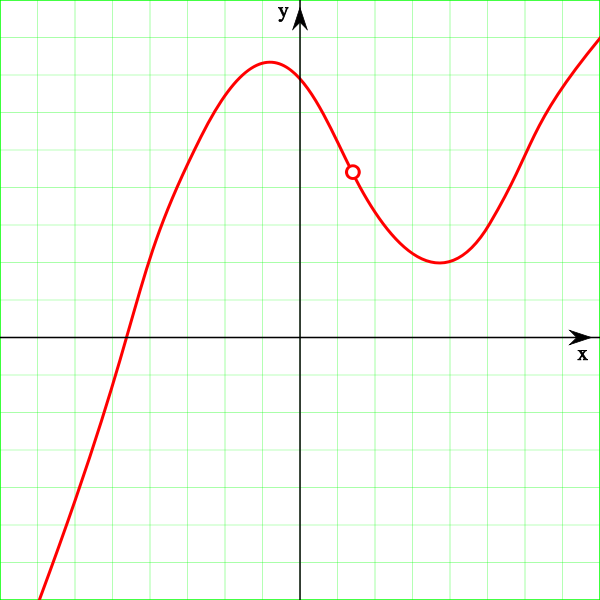
 y es finito pero
y es finito pero 
 y
y  pero que no sean iguales. A este tipo de discontinuidad de primera especie se le llama salto finito. Y el salto viene dado por:
pero que no sean iguales. A este tipo de discontinuidad de primera especie se le llama salto finito. Y el salto viene dado por:










 con
con  .
.
 o
o 




 tal que para toda x en el dominio de la función:
tal que para toda x en el dominio de la función:
 . Cuando xo no es de acumulación del dominio, la función es continua en ese punto.
. Cuando xo no es de acumulación del dominio, la función es continua en ese punto.

![lim_{h to 0} [f(x_1+h) - f(x_1)] = 0](https://petalofucsia.blogia.com/upload/externo-4df8e01639bb93378dff988f7f04a51d.png)
 .
.




 porque no está definida en x= 0. Si se extiende el dominio de la función a R (dándole un valor arbitrario a f(0)) la función será discontinua.
porque no está definida en x= 0. Si se extiende el dominio de la función a R (dándole un valor arbitrario a f(0)) la función será discontinua.![exists c in [a,b]](https://petalofucsia.blogia.com/upload/externo-c8b2256a45899c1bfd669e3bdb83619a.png) tal que
tal que 




 , se dice:
, se dice: si está definida en todo el dominio
si está definida en todo el dominio  y todas ellas son continuas.
y todas ellas son continuas. .
. si tiene derivadas continuas de cualquier orden. Aunque muchas sí lo son, no toda función de este tipo es
si tiene derivadas continuas de cualquier orden. Aunque muchas sí lo son, no toda función de este tipo es  si es la derivada en el
si es la derivada en el  si es la derivada k-ésima en el sentido de las distribuciones de una función de clase
si es la derivada k-ésima en el sentido de las distribuciones de una función de clase  se dice que es continua si:
se dice que es continua si: , diremos que
, diremos que 

![[a, b] ,](https://petalofucsia.blogia.com/upload/externo-ce151b90f347ecc5032a66dfcc3dfd0d.png)




![]a, b] mathrm{ acute o } (a, b] !](https://petalofucsia.blogia.com/upload/externo-4e73ba54e5f1ff3d874e1c869a9feb57.png)

![]a, b[ mathrm{ acute o } (a, b) !](https://petalofucsia.blogia.com/upload/externo-0197e6f78ceb08b9c88a1f8e8761cc9b.png)

![]-infty, b[ mathrm{ acute o } (- infty, b) !](https://petalofucsia.blogia.com/upload/externo-ac37a73a8ce88645fbd870088f5c4d8e.png)


![]-infty, b] mathrm{ acute o } (- infty, b] !](https://petalofucsia.blogia.com/upload/externo-7c9cd3491ba55e5e7c32ee002fd5107d.png)



![]a, infty [ mathrm{ acute o } (a, infty ) !](https://petalofucsia.blogia.com/upload/externo-83b88db0772c72eb8b011fe3af9c5239.png)

![]infty, + infty [ mathrm{ acute o } (infty, + infty ) !](https://petalofucsia.blogia.com/upload/externo-71bd273510c5e72bfca09cb657071b43.png)






 se denomina entorno reducido (E`).
se denomina entorno reducido (E`). el cual no es un intervalo pues es un
el cual no es un intervalo pues es un 


 .
.



